キューブ型ロボット
キューブ型ロボットとは、少し前にJAXAで製作されツイッター等で話題になった、不思議な動きをする正立方体型のロボットです。キューブの角で直立したり、向きを変えたりするわけですが、外面には足やタイヤ等は無くサイコロが勝手に動き回る様で本当に不思議で衝撃を受けました。
ちなみにJAXAの製作したCUBEロボットはこちらですJAXA研究開発部門
それで、その動画を見た中学生の娘が興味を持ち、これを作れたら面白いね!と言うところから、夏休みの科学展に向け一緒に作ろうという事になりました。結果的には今年の出展は間に合わなかったので、可能であれば来年出展できればいいかなぁと考えています。
まぁ、作ろうと言っても、もちろんJAXAやスイスの大学で作られたような高性能なものではなく、工作レベルでサイコロ型の物体が少し動けばOKです!
先ずは動作原理を娘と一緒に理解して、身近で手に入る部品の選定するところからスタート。
動作原理
このキューブ型ロボットには3個のモーターとモーターの回転を止める為のブレーキがついており、高速で回転するホイールを急に止めたりすることによって本体が動くというものです。JAXAの説明には「走行している自転車の前タイヤにブレーキをかけると、タイヤを軸に自転車本体が前方に起き上がろうと動く原理を利用している。」という事らしいです。
部品の選定
まずはモーター
なんとなく動作原理がわかったので、身近なもので高速で回転し且つ軽量なモーターと簡単に制御できるブレーキ機構を考えました。本物は3軸ジャイロ、3軸加速度計、電磁ブレーキ、姿勢制御用のコンピューターなど、素人の我々ではとても用意できないものばかりが内包されています。しかし、自転車で同じような動きが出来るなら、模型でも出来るはず!と工作レベルで近い物を作る為に色々と思案していたわけです。まぁそれで、色々とネットで調べるとHDDのブラシレスモーターやmicroサーボモータ等が安価で手に入りやすいので、心臓部はそれらに決定!で、家にある古いHDDを分解してはモーターを取りだそうとしましたが、HDDによっては圧入されているので、手持ちのHDDからは一つしか取れませんでした。最低でも3個、予備に1~2個は欲しいので、ハードOFFに行きHDDを探してきました。簡単に取り出せるHDDは裏に三か所のネジが見えるものです。ちょうどモータのある所です。多分見ればわかるかと思いますが、物によっては基板に隠れているのもありました。必要なのはモーターだけなので、ジャンク品で十分なので1個税込み315円程度で買えました。HDDの分解には特殊な星型工具が必要です。サイズはHDDによるので何とも言えませんか、T5~T20のセットがあれば大丈夫だと思います。



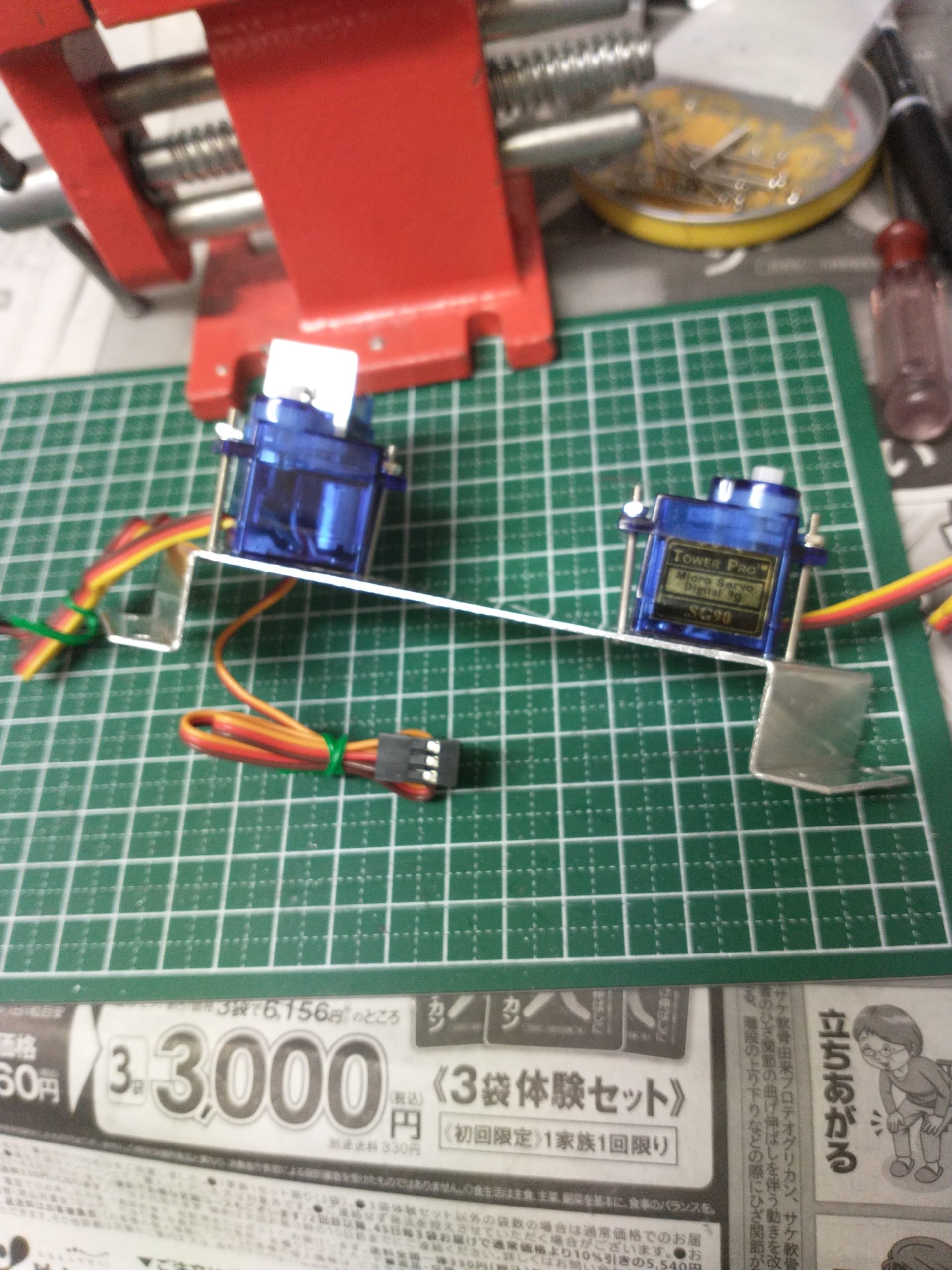
ブレーキ機構
これにはラジコンなどで使われるサーボモータを購入しました。モーターと言ってもグルグル回転するのではなく入力に対して決められた角度まで動いて、入力がなくなると元の位置に戻るものです。amazonで一番小さく安価でトルクフルなSG90というのを購入。
各部品の制御
これで、本体側の部品は決まりましたが、HDDのブラシレスモーターの制御、サーボモータの制御を考えなくてはなりません。ブラシレスモーターは通常のモーターと違い、+-の電池をつなげれば動くものではなく、ブラシが無い代わりに3か所または4か所ある端子に動作信号を内部のコイル(U,V,W巻き線+コモン端子)に入力しなくてはなりません。と言っても、そんな回路は作れないので、ブラシレスモータ・ドライバーと言う制御基板を購入しました。これもアマゾンで1個¥1000程度でした。
次にサーボモータの制御ですが、このモーターも電池をつなげれば動くのではなく、Pulse Width Modulation=PWMで制御しなくてはなりません。パルスと言う矩形波で動作する時間を制御し、サーボの動作角度を決定します。この制御には、小さい基板に自分でプログラムを入力し、サーボモータの制御など色々な事が出来る「Arduino」というマイコンボードを使用することにしました。Arduinoはオープンソースなので、色々な会社から同規格の製品が販売されています。購入したのはELEGOOのスターターキットで、メイン基板、LED、ステッピングモータ、抵抗、ジョイスティック等々色々なパーツがパッケージになっているので、一つあればいろいろと遊べそうです。

まだまだ先は長いですが、不定期に続きを書いていきます・・・
ではでは・・・